


Gerçekleştirdiğim ilk exoskeleton kontrolcü yazılımını bir süre içine girmeden test ettikten sonra ilk denek olarak kendimi seçtim. İngilizcedeki “taste your own medicine” deyimi aslen bu durumu karşılamasa da, deney öncesi beynimde yankılandığını hatırlıyorum. Öncelikle transparency modunu denedim. Robot herhangi bir destek vermiyordu ama hiçbir dirençle karşılaşmıyordum. Üstümde bir kabuğun varlığı vardı ama ağırlığı yoktu. Mühendis olmayan yanım bu yeni duyguyla tanışırken mühendis yanım “Ok! sensorless torque control çalışıyor” diye düşünüyordu. Sonrasında ise power assist moduna geçtim ve elime 10 kg’lık bir dumbbell aldım. Prototip tüm vücut boyunca destek sağlıyordu. Dumbbell’i taşırken daha önce hiç tecrübe etmediğim bir fiziksel etkileşim içindeydim. Elimde bir ağırlık vardı ve yorulmadan saatlerce tutabilirdim. Varlığı vardı ama ağırlığı yoktu. Hissi vardı ama yerçekimi o cisim için yok olmuştu. Ağırlığı biraz oynattım, bir süre elimde tuttum ve sıkıldım. Yazılım ve prototip düzgün çalışıyordu. Bias oluşturmayacak farklı subjelerle deneylere ve ileri safhalara geçildi. Ben ise bir daha o robotu kullanma ihtiyacı hissetmedim.
 İki yıl boyunca süren bu çalışmalardan sonra ise Kyoto’daki ATR Hesaplamalı Sinirbilim Laboratuvarına katıldım. Katıldığım grubun adı Beyin-Robot Arayüzü idi ve adından da anlaşılacağı üzere direkt olarak insan beyni ile robot arasında bir link oluşturmak isteniyordu. Bu tip arayüzler geçişsiz (İng. noninvasive) veya geçişli (İng. invasive) olabilir. Kabaca tarif etmek gerekirse, geçişli arayüzde ameliyatla beyninizdeki belli bölgelere elektrotlar yerleştirilir ve bu geçişli arayüzlerin kullanımı kimi klinik uygulamalarda kısıtlandırılır. Bu bağlamda, bizim grubumuz da geçişsiz bir arayüz tasarımı benimsemişti. Yürüme hareketinin fazlarının insan kafatasına yerleştirilen EEG (İng. Electroencephalography) problarıyla sınıflandırılmasına çalışıldı. Bu çalışmanın paralelinde ise yapay kaslarla hareket ettirilebilen XoR adında bir exoskeleton robot üretildi; bkz Şekil 2.
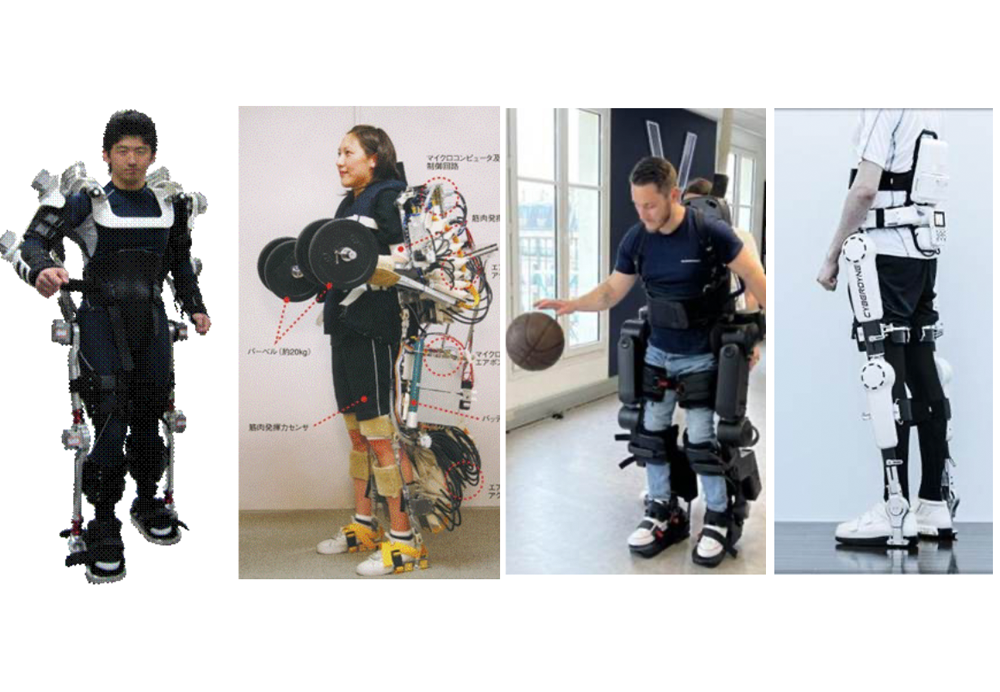
İki yıl boyunca süren bu çalışmalardan sonra ise Kyoto’daki ATR Hesaplamalı Sinirbilim Laboratuvarına katıldım. Katıldığım grubun adı Beyin-Robot Arayüzü idi ve adından da anlaşılacağı üzere direkt olarak insan beyni ile robot arasında bir link oluşturmak isteniyordu. Bu tip arayüzler geçişsiz (İng. noninvasive) veya geçişli (İng. invasive) olabilir. Kabaca tarif etmek gerekirse, geçişli arayüzde ameliyatla beyninizdeki belli bölgelere elektrotlar yerleştirilir ve bu geçişli arayüzlerin kullanımı kimi klinik uygulamalarda kısıtlandırılır. Bu bağlamda, bizim grubumuz da geçişsiz bir arayüz tasarımı benimsemişti. Yürüme hareketinin fazlarının insan kafatasına yerleştirilen EEG (İng. Electroencephalography) problarıyla sınıflandırılmasına çalışıldı. Bu çalışmanın paralelinde ise yapay kaslarla hareket ettirilebilen XoR adında bir exoskeleton robot üretildi; bkz Şekil 2.
Nüfusu hızla yaşlanan Japonya’da exoskeletonların rehabilitasyon amaçlı kullanımı başlıca hedeflenen konulardan biri. ATR’da ürettiğimiz exoskeletonu bir rehabilitasyon kliniğine götürdük ve terapistlerle beraber robot üzerinde çalıştık. Klinikte yapılan rehabilitasyon çalışmalarını gözlemlediğimde robotun kullanıcılara destek sağlayabildiğini, ancak insan-robot sisteminin dengesinin yeterince stabil olmadığını düşündüm. Exoskeleton hem içerde kullanıcı kaynaklı hem de dış kaynaklı bozucu etkilere maruz kalabiliyordu ve kullanımı %100 güvenli değildi.
Bir exoskeleton her tip durumda öz dengesini koruyabilmeli diye düşünerek öncelikle insan dengesinin biyomekaniğine çalıştım. Başlangıçtaki düşüncemin (ve insansı robotlarda uyguladığımızın) aksine, insanlarda denge kas gücünden ziyade merkezi sinir sisteminin kasların mekanik empedansını regüle etmesiyle sağlanıyordu. Bu bilgi ışığında yapay kaslarla hareket kabiliyeti sağlanan XoR üzerinde biyo-ilhamlı bir kontrol mekanizmasını geliştirdim. XoR, içerisinde cansız ve eklemli manken varken, her türlü darbeye maruz bırakıldığında bile yapay kaslarının empedansını gerçek zamanlı regüle ederek dengede kalmayı başardı. Hacıyatmaz gibiydi. ATR’ın Beyin-Robot Arayüzü grubunca üretilen XoR, literatürdeki ilk özdengelemeli exoskeleton ünvanına erişti (Ugurlu vd., 2016) ve beyin-robot arayüzü ile kontrol edildi (Noda vd., 2012).
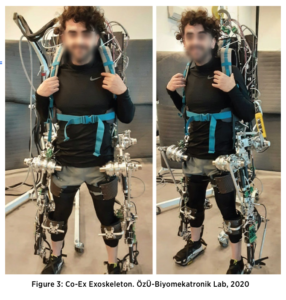 2015 yılında Özyeğin Üniversitesine katıldığımda da Türkiye’yi exoskeleton teknolojisi konusunda lider ülkelerden biri haline getirmeyi amaçladım. ATR’da geliştirdiğim dış iskelet robot sadece sagital (ön-arka) eksende özdengeleme sağlayabiliyordu. Kuruma katılmamla beraber TÜBİTAK 1001 programına yaptığım başvuru kabul edildi. Bu proje kapsamında kuvvet kontrollü özel eyleyicilere sahip, her eksende kendi kendini dengeleyebilen Co-Ex (Compliant Exoskeleton for human-robot Co-Existence; bkz. Şekil 3) adlı exoskeletonu geliştirdik. 2020’de tüm fonksiyonel testlerini tamamladık; bu testler literatürde yerini aldı ve sistem de ayrıca patent koruması altına alındı (Coruk vd., 2020 Yıldırım vd., 2026, Soliman vd., 2024). Laboratuvarımdaki exoskeleton çalışmaları iş arkadaşlarımla ortak bir şekilde farklı evrim çizgilerinde devam ettiriliyor.
2015 yılında Özyeğin Üniversitesine katıldığımda da Türkiye’yi exoskeleton teknolojisi konusunda lider ülkelerden biri haline getirmeyi amaçladım. ATR’da geliştirdiğim dış iskelet robot sadece sagital (ön-arka) eksende özdengeleme sağlayabiliyordu. Kuruma katılmamla beraber TÜBİTAK 1001 programına yaptığım başvuru kabul edildi. Bu proje kapsamında kuvvet kontrollü özel eyleyicilere sahip, her eksende kendi kendini dengeleyebilen Co-Ex (Compliant Exoskeleton for human-robot Co-Existence; bkz. Şekil 3) adlı exoskeletonu geliştirdik. 2020’de tüm fonksiyonel testlerini tamamladık; bu testler literatürde yerini aldı ve sistem de ayrıca patent koruması altına alındı (Coruk vd., 2020 Yıldırım vd., 2026, Soliman vd., 2024). Laboratuvarımdaki exoskeleton çalışmaları iş arkadaşlarımla ortak bir şekilde farklı evrim çizgilerinde devam ettiriliyor.
20 yıllık bu akışı bir kenara bırakıp ilk ürettiğim exoskeletonla aramdaki tanışma anına geri dönelim. Bütün bu projeler, patentler, yazılan kodlar, tasarlanan mekanizmalar, tartışmalar, sentezlerin öncesindeki an. Prototipin -her prototipte olduğu gibi- performans sınırları vardı, bilimkurguvari bir durum yoktu, alandaki meslektaşlarımın anlayabileceği bir teknolojiydi. Ancak avucumda hissettiğim o yapay kuvvette bir tekinsizlik vardı. Ara ara o anı düşünürüm.
O an asıl tekinsiz olan şey kuvvetin büyüklüğü değildi. Kuvvetin kaynağıydı. Tüm sistemin ayrıntılı matematik modelini biliyordum, kontrolcü yazılımındaki her satır bana aitti. Ama avcumdaki yük hafiflediğinde soru teknik olmaktan çıktı: Bu hareketin faili kimdi? O yükü ben mi kaldırıyordum, yoksa benimle birlikte çalışan bir sistem mi? Bir uzvu “benim” yapan şey yalnızca sinirsel komut mudur, yoksa o uzvun gerçekleştirdiği işlev midir? Eğer işlev belirleyiciyse, dışarıdan eklenen bir kuvvet ne zaman bana ait olur?
Aristoteles’in madde-form kuramında ruh, doğal ve potansiyel olarak bedenin ilk energia’sıdır (energia: kabaca potansiyeli fiili eyleme çevirme gücü). “Eğer göz başlı başına bir canlı olsaydı, görmek onun ruhu olurdu” der. Bu bağlamda sinir sistemine entegre, sürekli geri beslemeli, beden şemasına dahil bir exoskeleton üretebildiğimizi düşleyelim. Farklı bir gezegende, yüksek yerçekimi etkisi altında günlük işlevlerimizi söz konusu exoskeletonsuz yapamadığımızı, sürekli kullanımdan ötürü bu yapay sistemin kortikal haritalamada artık doğal bir uzvumuz gibi algılandığını tahayyül edelim. Her yeni jenerasyonla birlikte exoskeleton teknolojisinin geliştiğini, yeni doğan bireyler arasından exoskeleton sistemine uyum (CNS adaptasyonu) sağlayabilenlerin doğal seçilim sonucu daha çok gen aktarımında bulunabildiklerini ve bu tip bir eş-evrim süreci oluştuğunu hayal edelim. Bu senaryodaki insanla biz aynı insan olur muyuz?
Ve sinir sistemine entegre olan bu exoskeletonun bir gün insanın karar alma mekanizmasına ortak olduğunu düşünelim. Yeni bir rasyonel bütünlük oluşmaz mı? Akıl yürütme, amaç belirleme ve hatta normatif değerlendirme gibi düşünsel işlerin ortak yürüdüğünü varsayalım. Bu durumdaki insan-robot melezi bizimle aynı tür olur mu?
O gün avcumda hissettiğim yapay kuvvet, herhangi bir form sahibi olmaksızın halen aklımın gölge bir köşesinde duruyor.
I want more life, father.
Roy Batty, 2019 (1982)