
After testing my first exoskeleton controller for a while without wearing it, I chose myself as the first subject. The English phrase “taste your own medicine” echoed in my mind before the experiment, although it does not exactly capture the situation.
First, I tried the transparency mode. The robot provided no assistance, but I encountered no resistance either. I could feel the presence of a shell around my body, yet it had no weight. While the non-engineer side of me was experiencing this new sensation, the engineer within me was thinking: “OK, the sensorless torque control works.”
Then I switched to the power-assist mode and picked up a 10-kilogram dumbbell. The prototype provided support throughout the entire body. As I held the dumbbell, I was engaged in a physical interaction I had never experienced before. There was a weight in my hand, yet I could hold it for hours without fatigue. It had presence, but no weight. It had a sensation, but gravity seemed to have vanished for that object.
I moved it slightly, held it for a while, and eventually grew bored. The software and the prototype were working properly. Experiments proceeded with different subjects to avoid bias. As for me, I never felt the need to use that robot again.
After two years of work, I joined the Computational Neuroscience Laboratories at ATR in Kyoto. The group I joined was called the Brain–Robot Interface group, and as the name suggests, the goal was to establish a direct link between the human brain and a robot.
Such interfaces can be either non-invasive or invasive. In invasive interfaces, electrodes are surgically implanted in specific regions of the brain. Non-invasive interfaces, by contrast, rely on external measurements such as EEG signals recorded from the scalp. Our group therefore followed a non-invasive approach.
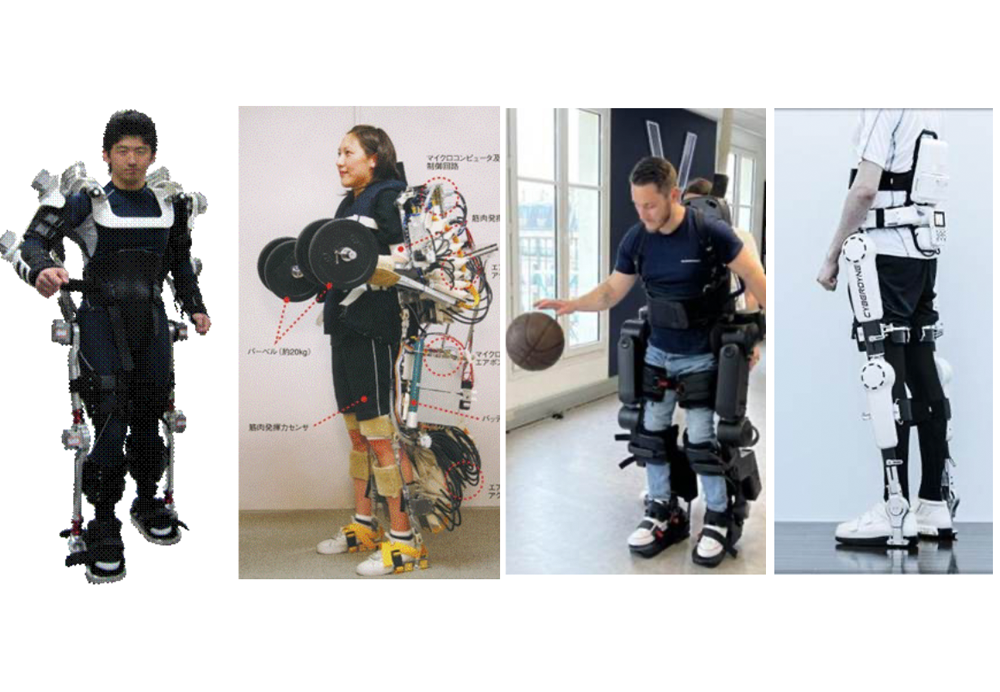
 One line of research attempted to classify the phases of human walking using EEG signals recorded through probes placed on the scalp. In parallel with this work, an exoskeleton robot called XoR, capable of motion through artificial muscles, was developed (see Figure 2).
One line of research attempted to classify the phases of human walking using EEG signals recorded through probes placed on the scalp. In parallel with this work, an exoskeleton robot called XoR, capable of motion through artificial muscles, was developed (see Figure 2).
In Japan, where the population is rapidly aging, rehabilitation is one of the primary target areas for exoskeleton technologies. We brought the exoskeleton developed at ATR to a rehabilitation clinic and worked with therapists on the system.
Observing rehabilitation sessions in the clinic, I felt that although the robot could indeed assist users, the balance of the human-robot system may not be sufficiently stable. The exoskeleton was exposed to disturbances from both the user and the environment, and its operation was not fully safe.
This led me to the idea that an exoskeleton should be able to maintain its own balance under all conditions. I began by studying the biomechanics of human balance. Contrary to my initial assumption — and unlike what we implemented in humanoid robots — human balance is achieved less through muscular strength and more through the central nervous system regulating the mechanical impedance of muscles.
Based on this insight, I developed a bio-inspired control mechanism for the XoR exoskeleton driven by artificial muscles. Even when the robot contained only a lifeless articulated mannequin, XoR was able to maintain balance under strong disturbances by regulating the impedance of its artificial muscles in real time. It behaved like a roly-poly toy.
The XoR system developed by ATR’s Brain–Robot Interface group thus became the first self-balancing exoskeleton reported in the literature (Ugurlu et al., 2016) and was also controlled via a brain-robot interface (Noda et al., 2012).
In 2015, when I joined Özyeğin University, I set the goal of making Türkiye one of the leading countries in exoskeleton technology. The exoskeleton developed at ATR could stabilize itself only in the sagittal (front–back) plane. Shortly after I joined OzU, a proposal I submitted to the TÜBİTAK 1001 research program was accepted.
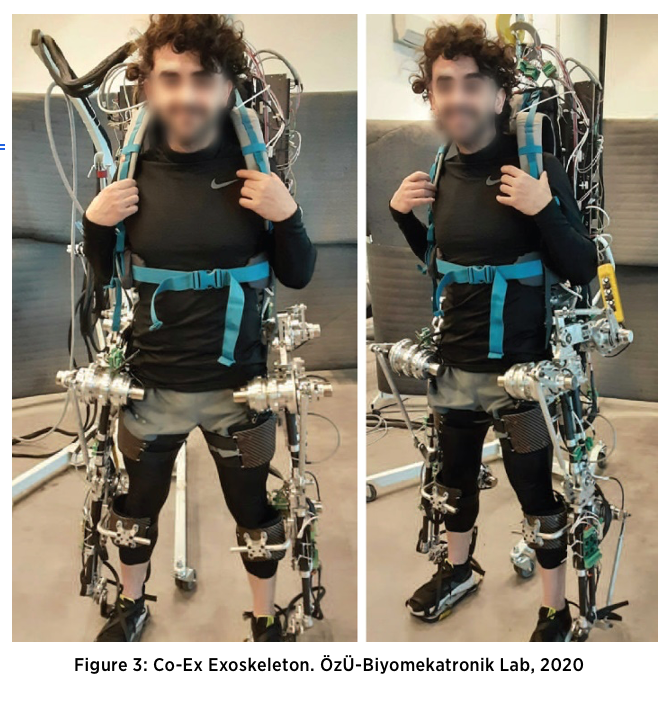 Within this project, we developed Co-Ex (Compliant Exoskeleton for Human-Robot Co-Existence; see Figure 3), an exoskeleton equipped with force-controlled custom actuators capable of maintaining balance along all axes. By 2020, we had completed all functional tests. These results were published in the literature, and the system was also protected by patents (Coruk et al., 2020; Yıldırım et al., 2026; Soliman et al., 2024).
Within this project, we developed Co-Ex (Compliant Exoskeleton for Human-Robot Co-Existence; see Figure 3), an exoskeleton equipped with force-controlled custom actuators capable of maintaining balance along all axes. By 2020, we had completed all functional tests. These results were published in the literature, and the system was also protected by patents (Coruk et al., 2020; Yıldırım et al., 2026; Soliman et al., 2024).
Research on exoskeleton systems in my laboratory continues along several evolutionary lines in collaboration with my colleagues.
Let us now set aside this twenty-year trajectory and return to the moment of my first encounter with the exoskeleton that was built at Toyota Technological Institute.
Before the projects, patents, software, mechanical designs, debates, and syntheses — there was that moment. Like all prototypes, the system had clear performance limits; it was not a science-fiction device, but a technology my colleagues in the field could easily understand.
Yet there was something uncanny in the artificial force I felt in my palm. From time to time, I still think about that moment.
The uncanny aspect was not the magnitude of the force.
It was its source.
I knew the detailed mathematical model of the entire system. Every line of the control software belonged to me. But when the load in my hand suddenly felt lighter, the question ceased to be technical:
Who was the agent of that movement?
Was I lifting that weight, or was a system working alongside me?
What makes a limb mine?
Is it merely the neural command that initiates movement, or the function that the limb performs?
If the function is decisive, at what point does the externally supplied force become mine?
In Aristotle’s theory of matter and form, the soul is the first actuality (energeia) of a natural body that potentially possess life. “If the eye were an animal,” he writes, “sight would be its soul.”
Let us imagine that we have produced an exoskeleton fully integrated with the nervous system, operating through continuous feedback and incorporated into the body schema. Suppose that on another planet, under high gravitational conditions, we cannot perform our daily activities without such an exoskeleton. Through continuous use, this artificial system becomes mapped within cortical representations as if it were a natural limb.
Now imagine that with each new generation, exoskeleton technology advances, and among newborns, those able to adapt to the exoskeleton through central nervous system plasticity gain a reproductive advantage through natural selection. Over time, this gives rise to a co-evolution. Would the humans in such a scenario still be the same humans as us?
And suppose that one day the exoskeleton, integrated into the nervous system, begins to participate in human decision-making. Would this not produce a new rational unity? Imagine reasoning, goal formation, and even normative evaluation being carried out jointly.
Would such a human-robot hybrid still belong to the same species as we do?
The artificial force I felt in my palm that day still remains somewhere in the shadowy corner of my mind, without possessing any form of its own.
“I want more life, father.”
Roy Batty, 2019 (1982)

